ذات المراوح الأربع


ذات المراوح الأربعة، المروحية الرباعية، الكوادكوبتر (Quadcopter)،[1] هي نوع من المروحيات أو المروحيات متعددة المراوح التي تحتوي على أربعة دوارات (مراوح).[2]
على الرغم من أن المروحيات الرباعية وconvertiplanes قد قامت بالتحليق تجريبياً فترة طويلة، إلا أن تكوينها ظل مثيرًا للفضول حتى وصول المسيرات الحديثة. يتيح الحجم الصغير والقصور الذاتي المنخفض للمسيرات استخدام نظام بسيط للغاية للتحكم في الطيران، مما أدى إلى زيادة كبيرة في التطبيق العملي للمروحيات الرباعية الصغيرة في هذا التطبيق.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
مبادئ التصميم
ينتج كل دوار كلاً من الرفع وعزم الدوران حول مركز دورانه، بالإضافة إلى السحب في الاتجاه المعاكس لاتجاه طيران المركبة.
تحتوي المروحيات الرباعية عمومًا على دوارين يدوران اتجاه عقارب الساعة (CW) واثنان عكس عقارب الساعة (CCW). يتم التحكم في الطيران من خلال الاختلاف المستقل في السرعة وبالتالي رفع وعزم الدوران لكل دوار. أما التحكم في الميل واللف فيكون عن طريق تغيير شبكة مركز الدفع، مع التحكم في الانعراج عن طريق تغيير شبكة عزم الدوران.[3]
على عكس المروحيات التقليدية، لا تتمتع المروحيات الرباعية عادة بالتحكم في درجة الدوران الدوري، حيث تتغير زاوية الشفرات ديناميكيًا أثناء دورانها حول محور الدوار. في الأيام الأولى للطيران، كان يُنظر إلى المروحيات الرباعية (التي يشار إليها إما باسم "كوادكوبتر") على أنها حل محتمل لبعض المشاكل المستمرة في الطيران العمودي. يمكن التخلص من مشكلات التحكم الناتجة عن عزم الدوران (بالإضافة إلى مشكلات الكفاءة الناشئة عن دوار الذيل، والتي لا تولد أي رفع مفيد) عن طريق الدوران المعاكس، كما أن إنشاء الشفرات القصيرة نسبيًا أسهل بكثير. ظهر عدد من التصاميم المأهولة في العشرينيات والثلاثينيات. كانت هذه المركبات من بين أول مركبات الإقلاع والهبوط العمودي الأثقل من الهواء الناجحة.[4] ومع ذلك، عانت النماذج الأولية من ضعف الأداء،[4] والنماذج الأولية الأخيرة تتطلب الكثير من عبء العمل التجريبي، بسبب ضعف زيادة الاستقرار[5] وقدرة التحكم المحدودة.
العزم
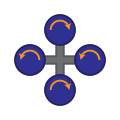
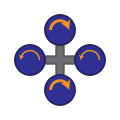
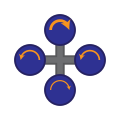
إذا كانت جميع الدوارات الأربعة تدور بنفس السرعة الزاوية، مع دوران اثنتين في اتجاه عقارب الساعة واثنتين عكس اتجاه عقارب الساعة، فإن صافي عزم الدوران حول محور الانعراج هو صفر، مما يعني عدم وجود حاجة إلى دوار الذيل كما هو الحال في المروحيات التقليدية. يحدث الانعراج بسبب عدم تطابق التوازن في عزم الدوران الديناميكي الهوائي (أي عن طريق موازنة أوامر الدفع التراكمية بين أزواج الشفرات ذات الدوران المعاكس).[6][7]

رسم تخطيطي لعزم الدوران التفاعلي لكل دوار في مروحية رباعية، بسبب دوران الدوارات. يدور الدواران الأول والثالث في اتجاه واحد، بينما يدور الدواران الثاني والرابع في الاتجاه المعاكس، مما ينتج عنه عزم دوران متعارض للتحكم.
تحوم المروحيات الرباعية أو تضبط ارتفاعها عن طريق تطبيق قوة دفع متساوية على جميع الدوارات الأربعة.
تضبط المروحيات الرباعية انعراجها عن طريق تطبيق المزيد من الدفع على الدوارات التي تدور في اتجاه واحد.
تضبط المروحيات الرباعية ميلها أو دورانها بتطبيق المزيد من الدفع على دوار واحد (أو دوارين متجاورين) ودفع أقل على الدوار المقابل تمامًا.




حالة الدوامة الحلقية
تخضع جميع المروحيات الرباعية للديناميكيات الهوائية العادية للطائرات العمودية، بما في ذلك حالة الدوامة الحلقية.[بحاجة لمصدر]
الهيكل الميكانيكي
المكونات الميكانيكية الرئيسية هي بدن الطائرة أو الإطار، والدوارات الأربعة (إما ذات شفرات بزاوية ميل ثابتة أو متغيرة)، والمحركات. للحصول على أفضل أداء وأبسط خوارزميات للتحكم، تكون المحركات والمراوح على مسافة متساوية.[8]
الدوارات المحورية

من أجل السماح بمزيد من القوة والاستقرار عند الوزن المنخفض، يمكن للطائرة الرباعية، مثل أي مروحية متعددة الدوارات أن تستخدم تكوين دوار متحد المحور. في هذه الحالة، يحتوي كل ذراع على محركين يعملان في اتجاهين متعاكسين (واحد متجه للأعلى والآخر متجه للأسفل).[بحاجة لمصدر]
العمليات
الطيران الذاتي
يعد تكوين المروحية الرباعية سهل البرمجة نسبيًا للطيران الذاتي. وقد سمح ذلك بإجراء تجارب على سلوك الاحتشاد المعقد بناءً على الاستشعار الأساسي للمسيرات المجاورة.[بحاجة لمصدر]
التحمل
أطول مدة طيران حققتها مروحية رباعية تعمل بالبطارية كانت ساعتين و31 دقيقة و30 ثانية. وقد سجل الرقم القياسي فرديناند كيكنگر من ألمانيا عام 2016.[9] في تسجيله الرقم القياسي، استخدم كيكنگر بطاريات ليثيوم-أيون ذات معدل تفريغ منخفض وعالية السعة وجرد هيكل الطائرة من الوزن غير الضروري لتقليل سحب الطاقة وزيادة القدرة على التحمل.[10]
استخدمت مصادر الطاقة البديلة مثل خلايا وقود الهيدروجين ومولدات الكهرباء والغاز الهجين لزيادة القدرة على التحمل بشكل كبير بسبب زيادة كثافة الطاقة لكل من الهيدروجين والگازولين، على التوالي.[11]
التاريخ
النماذج المبكرة
أول طائرة أثقل من الهواء تقلع عموديًا كانت مروحية رباعية الدوارات صممها لوي بريگيه. اختبرت فقط فقط في رحلة مقيدة وعلى ارتفاع بضعة أقدام. عام 1908، أفيد قيامها بالطيران "عدة مرات"، على الرغم من قلة التفاصيل .[12]
قام إتيان أوهميخن بتجربة تصميمات الطائرات العمودية في العشرينيات. ومن بين التصميمات التي جربها كان محرك أوهميخن رقم 2، الذي استخدم أربعة دوارات ذات شفرتين وثمانية مراوح، كلها مدفوعة بمحرك واحد. يمكن أن تتغير زاوية الشفرات الدوارة عن طريق الالتواء. تعمل خمس مراوح تدور في المستوى الأفقي على تثبيت الآلة جانبياً. تم تركيب مروحة أخرى في المقدمة للتوجيه. يعمل الزوج المتبقي من المراوح بمثابة الدفع للأمام. أظهرت الطائرة درجة كبيرة من الاستقرار وزيادة في دقة التحكم في ذلك الوقت، وأجرت أكثر من ألف رحلة تجريبية خلال منتصف العشرينيات. بحلول عام 1923، كانت قادرة على البقاء في الجو لعدة دقائق في كل مرة، وفي 14 أبريل 1924، حققت أول رقم قياسي على الإطلاق لمروحية من مسافة 360 مترًا. وأظهرت القدرة على إكمال دورة دائرية[13] ولاحقاً، كانت أول طائرة عمودية تكمل رحلة بدائرة مغلقة لمسافة كيلومتر واحد.

قام د. جورج دي بوتيزات وإيڤان جيروم بتطوير مروحية دي بوتيزات، ذات دوارات بستة شفرات في نهاية هيكل على شكل X. استخدمت مروحتين صغيرتين ذات خطوة متغيرة للتحكم في الدفع والانعراج. استخدمت المروحية التحكم الجماعي في درجة الصوت. بُنيت من قبل الخدمة الجوية للجيش الأمريكي، قامت بأول رحلة لها في أكتوبر 1922. أكملت حوالي 100 رحلة بحلول نهاية عام 1923. وكان أعلى ارتفاع وصلت إليه على الإطلاق حوالي 5 أمتار. على الرغم من إثبات جدواها، إلا أنها كانت ضعيفة وغير مستجيبة ومعقدة ميكانيكيًا وعرضة لمشاكل الموثوقية. كان عبء عمل الطيار مرتفعًا جدًا أثناء التحليق بحيث لم يتمكن من محاولة الحركة الجانبية.
فترة ما بعد الحرب
كان المقصود من ذات المراوح الأربع كونڤرتاوينگ، الموديل إيه أن تكون النموذج الأولي لخط مروحيات مدنية وعسكرية أكبر بكثير. يتميز التصميم بمحركين يقودان أربعة دوارات من خلال نظام أحزمة على شكل حرف V. لم تكن هناك حاجة إلى دوار خلفي وكان التحكم بها عن طريق تغيير الدفع بين الدوارات.[14] حلقت هذه المروحية عدة مرات منذ عام 1956، وأثبتت نجاح تصميمها رباعي الدوارات وكانت أيضًا أول مروحية رباعية تنجح في التحليق إلى الأمام. لكن نظراً لعدم وجود طلبات للإصدارات التجارية أو العسكرية، أُنهي المشروع. اقترحت شركة كونڤرتاوينگ الطراز E الذي يبلغ وزنه الأقصى 19 طن مع حمولة تبلغ 4.9 طن وبسرعة تصل إلى 278 كم/ساعة. نشأ دوّار هانسون المفصلي المرن عديم المحمل من العمل الذي تم إنجازه في أوائل الستينيات في شركة لوكهيد كاليفورنيا بواسطة توماس هانسون، الذي عمل سابقًا في شركة كونڤرتاوينگ على تصميم الدوار ونظام التحكم في دوارات المروحية الرباعية.[15][16]
كان مشروع گلوستر لرش المحاصيل عام 1960 مثالًا مبكرًا على المروحيات الرباعية المسيرة. ليتم تشغيلها بواسطة محرك پوتز 4E مسطح رباعي الأسطوانات ومبرد بالهواء بقوة 105 حصان، وتفرغ حمولتها البالغة 20 جالونًا من خلال ذراع رش بطول 22 قدمًا. يشغل المروحية اثنان من المشغلين بحمل منارات موجهة على طرفي نقيض من مسار الرش، بحيث تكون المروحية الرباعية دائمًا في موقع المنارة ولا تتجاوز الهدف. ومع ذلك، على الرغم من التصميم المبسط ومتطلبات التشغيل مقارنة بالآلة التجريبية، رفض مجلس إدارة الشركة الأم تطويرها وظل مشروعًا ورقيًا.[17]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
كانت كورتيس-رايت VZ-7 عام 1958 مروحية إقلاع وهبوط عمودي من تصميم كورتيس-رايت للمنافسة على تصميم "الجيب الطائر" في قيادة النقل والأبحاث بالجيش الأمريكي. كان يتم التحكم في VZ-7 عن طريق تغيير دفع كل من دوارات المروحة الأنبوبية الأربعة.
كان پياسكي PA-97 عبارة عن اقتراح لطائرة هجينة كبيرة تم فيها دمج مروحية رباعية مع منطاد أخف من الهواء في الثمانينيات.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
التطورات الحالية
يأخذ مفهوم بل بوينگ جواد تيلتروتور مفهوم المروحية الرباعية الثابتة إلى أبعد من ذلك من خلال دمجه مع مفهوم الدوار المائل للنقل العسكري المقترح بحجم الطائرة سي-130.

{kind=link}

{kind=link}
تعمل إيرباص على تطوير مروحية رباعية تعمل بالبطارية لتعمل كسيارة أجرة جوية في المناطق الحضرية، في البداية ستحلق بواسطة طيار لكن من المحتمل أن تكون ذاتية الطيران في المستقبل.[18]
المسيّرات

{kind=link}
في العقود الأولى من العقد الأول من عقد 2000، أصبح تصميم المروحيات الرباعية شائعًا في المسيرات صغيرة الحجم. أدت الحاجة إلى طائرات ذات قدرة أكبر على المناورة والتحليق إلى زيادة أبحاث المروحيات الرباعية. يتيح التصميم رباعي الدوارات للمروحيات الرباعية أن تكون بسيطة نسبيًا في التصميم لكنها موثوقة للغاية وقادرة على المناورة. تستمر الأبحاث في زيادة قدرات المروحيات الرباعية من خلال تحقيق تقدم في الاتصالات متعددة الحرف واستكشاف البيئة والقدرة على المناورة. إذا أمكن الجمع بين هذه الصفات المتطورة، فستكون المروحيات الرباعية قادرة على القيام بمهام مستقلة متقدمة غير ممكنة حاليًا مع المركبات الأخرى.[19]
في حين أُنتجت المروحيات الرباعية الصغيرة التي يتم التحكم فيها عن بعد في اليابان بالفعل في أوائل التسعينيات، فإن أول طائرة مزودة بكاميرا بكميات كبيرة (نظام الڤيديو الجوي المستقر دراگانفلاير، بأثر رجعي أيضًا دراگانفلاير 1، بواسطة شركة دراگانفلاي الكندية الناشئة) لم يتم تصميمها حتى عام 1999.[20][21]
في الفترة من 2005 حتى 2010 تقريبًا، سمح التقدم في مجال الإلكترونيات بإنتاج وحدات تحكم طيران رخيصة الثمن وخفيفة الوزن، مقاييس التسارع (IMU)، أنظمة تحديد المواقع العالمي والكاميرات. أدى ذلك إلى أن يصبح تكوين المروحيات الرباعية شائعًا في المسيرات الصغيرة. بفضل حجمها الصغير وقدرتها على المناورة، يمكن لهذه المروحيات الرباعية التحليق في الداخل والخارج.[1][22]
بالنسبة للمسيرات الصغيرة، تعد المروحيات الرباعية أرخص وأكثر متانة من المروحيات التقليدية بسبب بساطتها الميكانيكية.[23] تعتبر شفراتها الأصغر حجمًا مفيدة أيضًا لأنها تمتلك طاقة حركية أقل، مما يقلل من قدرتها على التسبب في الضرر. بالنسبة للمروحيات الرباعية صغيرة الحجم، فإن هذا يجعل المركبات أكثر أمانًا للتفاعل الوثيق. من الممكن أيضًا تزويد المروحيات الرباعية بواقيات تحيط بالدوارات، مما يقلل من احتمالية حدوث ضرر.[2] ومع ذلك، مع زيادة الحجم، تتطور المروحيات الرباعية ذات المروحة الثابتة إلى عيوب مقارنة بالمروحيات التقليدية. زيادة حجم الشفرة يزيد من زخمها. وهذا يعني أن التغييرات في سرعة الشفرة تستغرق وقتًا أطول، مما يؤثر سلبًا على التحكم. لا تواجه هذه المروحيات المشكلة لأن زيادة حجم قرص الدوار لا يؤثر بشكل كبير على القدرة على التحكم في ميل الشفرة.
نظرًا لسهولة بنائها والتحكم فيها، تحظى المروحيات الرباعية بشعبية كبيرة كمشاريع الطائرات النموذج للهواة.[24][25]
الأنشطة الإجرامية
طوال القرن الحادي والعشرين، تواردت أنباء عن حالات استخدام مروحيات رباعية مسيرة في أنشطة إجرامية. بسبب بناء جدار الحدود الأمريكية المكسيكية، لجأت بعض عصابات المخدرات إلى استخدام المروحيات الرباعية لتهريب المخدرات.[26] ومع ذلك، لا تقوم المروحيات الرباعية المسيرة بالضرورة بتهريب المخدرات عبر الحدود فحسب، بل هناك أيضًا حالات يتم فيها تهريب الأسلحة والمواد المحظورة الأخرى إلى السجون حول العالم.[27]
كما تستخدم المروحيات الرباعية المسيرة في الأنشطة الإجراية في أوروپا أيضاً. في أغسطس 2021، ضبط شرطي في التشيك مروحية رباعية كانت تنقل كيسًا من المثامفتامين.[28]
انظر أيضاً
المصادر
- ^ أ ب Hoffmann, G.M. (November 2004). "The Stanford Testbed of Autonomous Rotorcraft for Multi Agent Control (STARMAC)".: 12.E.4/1–10. doi:10.1109/DASC.2004.1390847.
- ^ أ ب Hoffman, G. (20–23 August 2007). "Quadrotor Helicopter Flight Dynamics and Control: Theory and Experiment"..
- ^ Stafford, Jesse (Spring 2014). "How a Quadcopter works | Clay Allen". University of Alaska, Fairbanks. Retrieved 2015-01-20.
- ^ أ ب Leishman, J.G. (2000). Principles of Helicopter Aerodynamics. New York, NY: Cambridge University Press. ISBN 9780521858601.
- ^ Anderson, S.B. (1997). "Historical Overview of V/STOL Aircraft Technology". NASA Technical Memorandum 81280.
- ^ "Quadrotor". Archived from the original on 27 December 2014. Retrieved 29 December 2014.
- ^ Andrew Hobden. "Quadcopters: Yaw". hoverbear.org. Retrieved 3 April 2017.
- ^ Uriah (2010-04-13). "Wyvern Quadrotor Helicopter". Retrieved 29 December 2014.
- ^ Ferdinand Kickinger (2016-04-30), 151min30s FPV with Copter, https://www.youtube.com/watch?v=6AUd7K1lG6o, retrieved on 2018-08-26
- ^ SPK Drones. How Quadcopters Fly.
- ^ McNabb, Miriam (February 2018). US Manufacturer Harris Aerial Launches New Hybrid Gas Electric Drone. Dronelife
- ^ Young, Warren R. (1982). The Helicopters. Chicago: Time-Life Books. p. 28. ISBN 978-0-8094-3350-6.
{{cite book}}:|work=ignored (help) - ^ "A Successful French Helicopter" Flight 24 January 1924 p47
- ^ "1956 - 1564 - Flight Archive". flightglobal.com. Retrieved 13 March 2015.
- ^ "Patent US3261407 - Helicopter rotor system". google.com. Retrieved 13 March 2015.
- ^ Inan, Esin; Kiris, Ahmet (2007-01-20). The Seventh International Conference on Vibration Problems ICOVP 2005. Springer. ISBN 9781402054013. Retrieved 13 March 2015.
- ^ James, Derek N.; Gloster Aircraft Since 1917, Putnam, 1971, p.413.
- ^ "Airbus on track to fly its electric aerial taxi in 2018". 5 October 2017.
- ^ "Illumin - The Quadrotor's Coming of Age". Retrieved 29 December 2014.
- ^ Darack, Ed. "A Brief History of Quadrotors". Air & Space Magazine.
- ^ "Our Story | Draganfly". draganfly.com. Archived from the original on 12 December 2016. Retrieved 17 December 2021.
- ^ Büchi, Roland (2011). Fascination Quadrocopter. Books on Demand. ISBN 978-3-8423-6731-9.
- ^ Pounds, P. (December 2006). "Modelling and Control of a Quad-Rotor Robot"..
- ^ "How-To: Quadrocopter based on Arduino". MAKE. Archived from the original on 11 December 2011. Retrieved 29 December 2014.
- ^ "FrontPage - UAVP-NG - The Open Source Next Generation Multicopter". Retrieved 29 December 2014.
- ^ "Drug smugglers turn to drones, advancing operations". DroneDJ (in الإنجليزية الأمريكية). 2020-12-21. Retrieved 2021-08-10.
- ^ "Věznice | EAGLE.ONE". Eagle.One (in التشيكية). Retrieved 2021-08-10.
- ^ Pokorný, Petr (2021-08-10). "Strážník v Doksech rukama chytil neregistrovaný dron, který přenášel pervitin". Českolipský deník (in التشيكية). Retrieved 2021-08-10.