ملف:Euclidian and non euclidian geometry.png
حجم هذه المعاينة: 800 × 300 بكسل. البعد الآخر: 4٬000 × 1٬500 بكسل.
الملف الأصلي (4٬000 × 1٬500 بكسل حجم الملف: 128 كيلوبايت، نوع MIME: image/png)
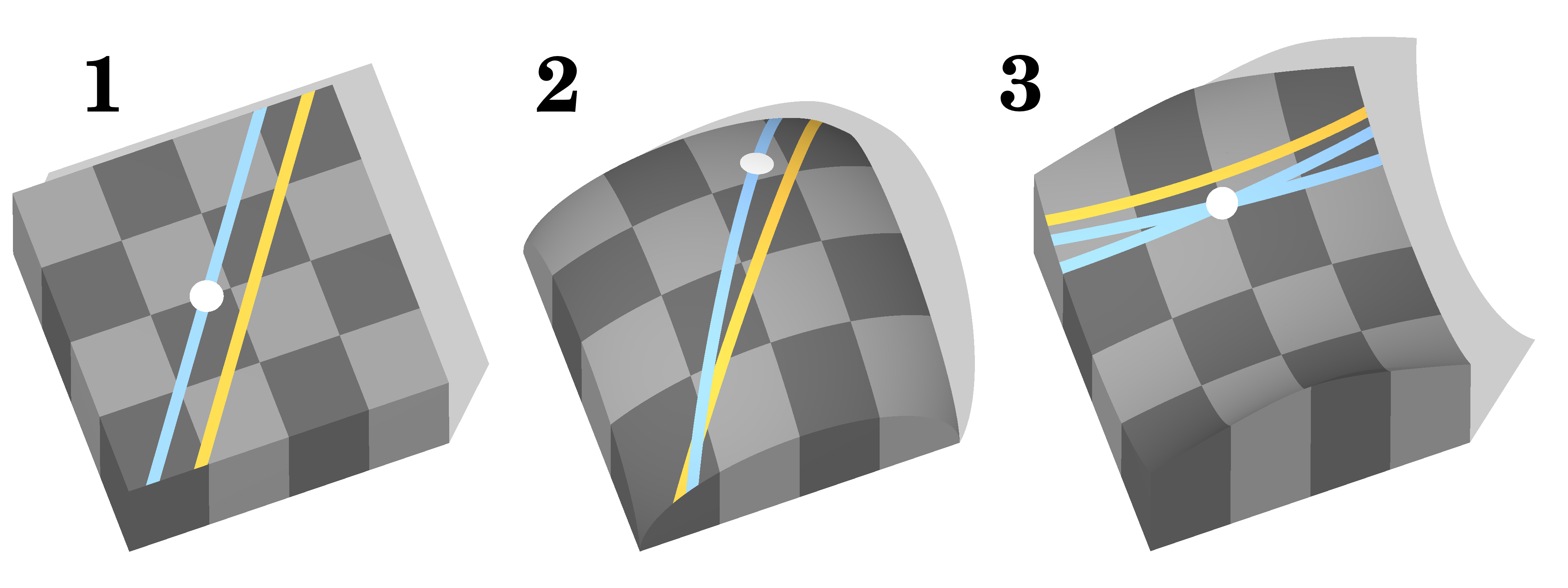
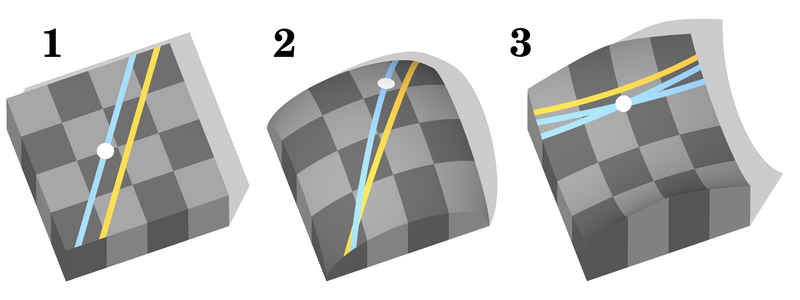
Shows three "blocks" with varying surfaces, whereon a point and som lines are "drawn" to demonstrate
- euclidian
- elliptical and
- hyperbolic geometry
To be exact, the hyperbolic surface was approximated using a chunk of the "inside" of a torus - this may not be perfectly accurate, but apparently it "looks right" in this illustration. :-)
Rendered using POV-Ray (see http://www.povray.org) and the scene description "code" below, then cropped and "numbered" using a graphics software package.
/*
====================================================================
Surfaces demonstrating euclidian, elliptical and hyperbolic geometry
--------------------------------------------------------------------
Created by Søren Peo Pedersen - see my user page at
http://da.wikipedia.org/wiki/Bruger:Peo
====================================================================
*/
// Macro for texture with background pattern, lines, and point "marker"
#macro SurfaceDrawing (
Point, // Position vector: Location of white point
RefLineMove, // Transformation: Where to place the yellow reference line
Lines // Object that renders the blue line(s)
)
#local BasePattern=pigment { // The underlying, dark grey checkerboard pattern
checker
color rgb 0.4
color rgb 0.6
scale <1,1000,1>
}
#local SP1 = pigment { // Checkerboard pattern with yellow "reference line" added
object {box {<-.07,-10,-10>,<.07,10,10> transform{RefLineMove}}
pigment {BasePattern}
pigment {color rgb <1,.8,.3>}
}
}
#local SP2 = pigment { // Checkerborad + yellow line with user-defined (blue) lines added
object {Lines
pigment {SP1}
pigment {color rgb <.6,.8,1>}
}
}
#local SP3 = pigment { // Checkerboard + lines with whit point "marker" added
object {
sphere { Point, .2 }
pigment {SP2}
pigment {color rgb 1}
}
}
pigment { // Definition of pigment, confined to a box slightly smaller than the "blocks"
boxed // to make the lines and point only appear on the top of the blocks
pigment_map {
[0.0000 BasePattern scale .5 translate <0,-1,0>]
[0.0001 BasePattern scale .5 translate <0,-1,0>]
[0.0001 SP3 scale .5 translate <0,-1,0>]
[1.0000 SP3 scale .5 translate <0,-1,0>]
}
scale <2,2,2> translate <0,2,0>
}
finish {ambient .7 diffuse .3}
#end // End of macro
plane {<0,1,0>,0 // White "tabletop" to receive shadows of the blocks (helps visualisation)
pigment {color rgb 1}
finish {ambient .8 diffuse .5}
}
box {<-2,0,-2>,<2,2,2> // Demonstrating euclidean geometry
texture {
SurfaceDrawing(<-.3,2,0>,
transform {rotate <0,35,0> translate <.3,0,0>},
box {<-.07,-10,-10>,<.07,10,10> rotate <0,35,0> translate <-.3,0,0>}
)
}
rotate <0,-20,0>
translate <-6,0,0>
}
intersection { // Demonstrating elliptical, or "Riemann", geometry
box {<-2,0,-2>,<2,5,2>}
sphere {<0,0,0>,2.8285}
texture {
SurfaceDrawing(<.65,2.45,1.25>,
transform {rotate <0,5,0> rotate <-45,35,0>},
box {<-.07,-10,-10>,<.07,10,10> rotate <0,-4,0> rotate <-45,35,0>}
)
}
rotate <0,-20,0>
translate <0,0,0>
}
intersection { // Demonstrating hyperbolic geometry
box {<-2,0,-2>,<2,4,2>}
torus {7.03,5 rotate <90,90,0> translate <0,4,0>}
texture {
SurfaceDrawing(<0,2.3,1>,
transform {rotate <0,90,0> rotate <-40,0,0> translate <0,4,0>},
merge {
box {<-.07,-10,-10>,<.07,10,10>
rotate <0,85,0> rotate <-30,0,0> translate <0,4,0>
}
box {<-.07,-10,-10>,<.07,10,10>
rotate <0,95,0> rotate <-30,0,0> translate <0,4,0>
}
}
)
}
rotate <0,-20,0>
translate <6,0,0>
}
camera { // Viewpoint
location <0,2100,-800>
look_at <.5,0,0>
angle .47
}
light_source {<-50,200,-100> color rgb 1.5} // Illumination
|

{kind=link}
تاريخ الملف
اضغط على زمن/تاريخ لرؤية الملف كما بدا في هذا الزمن.
| زمن/تاريخ | صورة مصغرة | الأبعاد | مستخدم | تعليق | |
|---|---|---|---|---|---|
| حالي | ★ مراجعة معتمدة 01:31، 9 أكتوبر 2023 | 4٬000 × 1٬500 (128 كيلوبايت) | Pastakhov (نقاش | مساهمات) | Upload https://upload.wikimedia.org/wikipedia/commons/5/5e/Euclidian_and_non_euclidian_geometry.png |
لا يمكنك استبدال هذا الملف.
وصلات
لا يوجد صفحات تصل لهذه الصورة.
{kind=link}